
摘要
近年来,世界上发生了许多毁灭性的野火,在全球范围内造成了破坏性的人类和环境影响。应急反应和减灾快速反应要求采取有效的方法进行近乎实时的野火监测。合成孔径雷达(Synthetic Aperture Radar, SAR)具有穿透云层和烟雾、昼夜成像的能力,可以在野火监测中发挥关键作用。在本次通信中,我们研究并展示了Sentinel-1 SAR时间序列与深度学习框架的潜力,用于近实时野火进展监测。基于卷积神经网络(CNN)的深度学习框架可以利用在野火期间获得的每一张新的SAR图像,并利用所有可用的火灾前SAR时间序列来表征时间反向散射变化,从而自动检测烧伤区域。结果表明,Sentinel-1 SAR后向散射可以探测野火并捕获其时间进程,这三次大型且有影响力的野火分别是2017年加拿大不列颠哥伦比亚省的象山大火、2018年美国加利福尼亚州的坎普大火和2019年加拿大阿尔伯塔省北部的查克格溪大火。与传统的对数比算子相比,基于cnn的深度学习框架能够更好地识别烧伤区域,准确率更高。这些研究结果表明,随着2019年RADARSAT星座任务和SAR CubeSat星座的发射,每天和每小时的数据可用时,具有深度学习的星载SAR时间序列可以在近实时野火监测中发挥重要作用。
类似的内容被其他人浏览

介绍
研究表明,人为引起的气候变化导致炎热、干燥的气候条件,增加了各地野火的爆发1。在2017年和2018年,世界目睹了许多毁灭性的野火。整个北欧和北美的炎热夏季和干旱导致瑞典等凉爽潮湿地区,甚至北极圈以北的野火活动增加。2018年夏天,瑞典经历了异常漫长的干旱,导致50多起森林火灾。在加拿大不列颠哥伦比亚省,2018年共有2092起野火烧毁了130多万公顷土地,而在美国加利福尼亚州,共有8527起野火烧毁了80万公顷土地,这是加州历史上最致命和最具破坏性的野火季节。及早确定这些火灾的位置和规模可以在早期阶段为消防行动提供信息。此外,能够在多云和烟雾条件下以及白天和夜间监测野火的进展和燃烧区域,将增加决策的信息库,提高野火应急响应的速度和效率。卫星遥感具有全局性视野和定期回访的大面积覆盖,长期以来在包括野火在内的灾害管理中发挥着至关重要的作用。随着卫星技术的飞速发展,我们正在迈向对地观测的新时代。国家和国际空间机构以及创新公司已经启动了各种EO项目,这些项目能够获得大量空间分辨率越来越高、时间间隔越来越短的卫星图像。随着欧洲航天局(ESA)哨兵1号和哨兵2号卫星最近的发射,全球覆盖和频繁回访的SAR和光学数据已经可以免费获得。这些开放的EO大数据为开发接近实时野火监测的创新方法提供了巨大的机会。主要的挑战是缺乏可靠的自动化方法来从如此大量的EO数据中提取相关信息。
对于主动野火监测,低空间分辨率可见光红外成像辐射计套件(VIIRS)和中分辨率成像光谱仪(MODIS)通常用于初步绘图和情境感知,而Landsat和Sentinel-2数据则用于火灾后边界确定和烧伤严重程度绘图2,3,4,5。然而,由于北方和热带地区频繁的云层覆盖,关键时间框架的光学图像往往是不可用的。SAR作为一种主动传感技术,不依赖于太阳辐射,能够穿透云层和烟雾,并且能够昼夜成像7。因此,SAR在环境变化监测中发挥着越来越重要的作用。过去的研究评估了X、C和l波段不同偏振的SAR数据,用于烧伤面积测绘和烧伤严重程度估计8,9,10,11,12,13,14,15,16,17。例如,Bourgeau-Chavez等人17评估了使用欧洲遥感卫星(ERS) c波段SAR数据在全球各种北方生态系统中探测北方火灾疤痕的可能性。Gimeno等人利用主成分分析(PCA)和神经网络分类识别地中海森林的烧毁区域18。Polychronki等人评估了先进陆地观测卫星(ALOS)相控阵型l波段合成孔径雷达(PALSAR)图像在希腊使用基于目标的分类进行烧伤区域测绘13。Tanase等人研究了星载X、C和l波段共极化和交叉极化数据,用于估算西班牙松林的烧伤严重程度16。先前的研究结果表明,在火灾干扰的森林中,c波段VH后向散射显著减少,并证明了交叉极化SAR在检测烧伤疤痕方面的有效性11,19。相反,一些基于c波段sar的研究表明,由于降雨事件和低蒸散,北方和地中海地区火灾干扰森林的共极化后向散射增加了10,13,14,15,17,20,21。由于森林冠层的部分或完全消失,土壤湿度的变化对SAR后向散射有显著影响。在土壤湿润的情况下,阿拉斯加火痕的c波段SAR后向散射比邻近的未燃烧森林高3 ~ 6 dB。在世界各地不同环境条件下,包括澳大利亚、加拿大、印度尼西亚、地中海和西伯利亚等地的火扰森林中,也观察到类似的土壤湿度变化引起的后向散射行为。
最近的研究调查了Sentinel-1的火灾疤痕测绘能力,结果好坏参半8,11,24。根据Imperatore et al.11的研究,在以森林为主的燃烧区域,VH后向散射有明显的变化,从而可以划定受火灾影响的区域。然而,对草地和非森林植被的烧伤区域的检测更为复杂。烧草的c波段SAR后向散射与干草相似。使用SAR探测烧伤区域和绘制火灾伤痕的主要挑战与SAR系统参数的复杂相互作用有关,包括频率、极化、入射角和观测方向,以及地表参数,包括几何特性(类型和结构、表面粗糙度、几何和地形等)和介电特性(即表面湿度),以及环境条件(例如雨、露、风等)。因此,需要进一步研究Sentinel-1 c波段SAR在VV和VH极化下的后向散射特性。还研究了星载SAR数据及其与陆地卫星数据的融合,用于近实时森林砍伐监测25,26,27。然而,据我们所知,没有研究发现SAR用于野火进展监测。因此,有必要对Sentinel-1 SAR密集时间序列数据进行野火监测。野火烧毁植被导致SAR后向散射强度的变化,可以通过变化检测来识别。
变化检测已经成功地应用于许多不同的应用,包括监测环境变化、土地利用/土地覆盖动态、森林砍伐、灾害破坏和城市化28,29,30,31,32,33。已经开发了各种变化检测技术,例如Bruzzone和Prieto34、Bazi等人35、Bovolo和Bruzzone36以及Bovolo等人37。然而,这些方法和算法中的大多数都是考虑到可用于检测变化的几个或两个图像(事件前和事件后)的可用性而开发的。由于野火影响森林环境的复杂性,利用SAR数据进行变化检测仍然是一项具有挑战性的任务。然而,一些常见的变化检测问题可以通过利用Sentinel-1时间序列的高时间分辨率来解决,这些时间序列使用了大数据范式下的高度冗余信息。这个想法是利用遥感测量的时间波动来消除燃烧区域和其他变化之间的混淆。作为大数据分析中增长最快的趋势之一,深度学习被证明是一种非常有效的大规模图像识别技术(38,39,40)和语义分割技术(41)。在深度学习模型中,最令人兴奋的是CNN在学习复杂非线性变换和通过交错卷积层和池化层从原始图像像素中提取中高级特征表示方面的潜力。最近的研究强调了使用深度神经网络从EO数据中提取变化的潜力42,43,44,45。因此,本研究对基于cnn的框架和其他深度学习方法进行了研究。
在本研究中,我们使用基于深度学习的框架研究了Sentinel-1 SAR密集时间序列,用于通过烟雾、云和夜间进行近实时野火进展监测。我们的具体目标是:(1)更好地了解烧毁森林和草地的时间反向散射格局;(2)对Sentinel-1 SAR密集时间序列进行近实时野火监测;(3)开发基于cnn的深度学习框架,利用SAR密集时间序列数据高效自动检测烧伤区域;(4)在三个不同的研究区域,即加拿大不列颠哥伦比亚省的象山火灾(2017年)、美国加利福尼亚州的坎普火灾(2018年)和加拿大阿尔伯塔省北部的查克格溪火灾(2019年)中验证所提出的深度学习框架。
研究领域和数据描述
研究领域
最近的三场野火,象山野火(加拿大,2017年),坎普大火(美国,2018年)和查克格溪大火(加拿大,2019年),被选择用于本研究,以代表不同的环境条件。象山野火(加拿大)是2017年不列颠哥伦比亚省最大的野火。这场大火于7月6日在阿什克罗夫特附近的汤普森河沿岸开始,并于2017年9月中旬得到控制,摧毁了300多座建筑物,促使大规模疏散,烧毁了约19.2万公顷的森林。引人注目的大火从西南部的阿什克罗夫特和卡什克里克开始,向北蔓延到克林顿,再向西北蔓延,然后蔓延到东北部的谢里丹湖,然后沿着死人谷的边缘向南蔓延。该地区人口稀少,地形复杂,进出能力有限。海拔278 ~ 1785米,平均海拔1142米,标准差224.9米。坡度从0°到71°不等,平均坡度为8.1°,标准差为6.85°,这与地形的复杂性有关。主要的土地覆盖类型包括森林、草地、空旷地带、荒地和居民点。
坎普大火是加州历史上最致命、最具破坏性的野火。大火于11月8日在加利福尼亚州北部巴特县坎普克里克路附近起火,11月25日得到控制,造成至少85名平民死亡,3人失踪,17人受伤,52000人被疏散。大火还摧毁了18804座建筑物,烧毁了62000多公顷土地。该地区位于美国西部内华达山脉和内华达山脉的山麓。与象山相比,这个地区有陡峭复杂的山地地形。海拔49 ~ 1569 m,平均海拔551 m,标准差325 m。斜率从0°到72°不等。平均斜率为14.6°,是象山的两倍,标准差为9.91°。主要的土地覆盖类型包括森林、草地、荒地、耕地和居民点。
位于高水平以西的查克格溪大火是2019年阿尔伯塔省最大的森林火灾。这场大火于2019年5月17日开始,于2019年7月26日得到控制,烧毁了约350134公顷的植被。与上述两个研究区相比,该区域的地形不那么复杂,相对平坦。海拔248 ~ 796 m,平均海拔375.5 m,标准差55.4 m。相应的斜率从0°到60°不等,平均斜率为2.25°,标准差为2.06°。主要的土地覆盖包括森林、灌丛、草地、湿地和荒地。三个研究区的地理地形如图1所示。

研究领域:象山大火(加拿大,2017年),坎普大火(美国,2018年)和查克格溪大火(加拿大,2019年)。研究区地图基于Google Earth Engine中的Terrain Base Map层,使用ArcGIS 10.7.1软件生成(地图数据©2019 Google)。
数据描述
Sentinel-1 SAR数据
哨兵1号任务是欧洲航天局五次哥白尼任务中的第一次,是由两颗极地轨道卫星组成的星座,分别于2014年4月3日和2016年4月25日发射。c波段合成孔径雷达(SAR)以双偏振昼夜工作,并在赤道46进行为期6天的重新访问,无论天气如何,都能连续获取图像(ESA, 2019)。本研究收集了2017年、2018年和2019年大象山火、Camp Fire和Chuckegg Creek Creek Fire现场所有可用的Sentinel-1 SAR c波段VV和HV极化时间序列数据,采用干涉宽幅(IW)模式获取。从谷歌地球引擎(GEE)平台47下载的1级地面距离检测(GRD)产品由已检测的聚焦SAR数据组成,使用地球椭球模型进行多次观察和投影到地面范围。然后将SAR数据进行地形校正,通过对数缩放转换为分贝(dB)。
参考数据
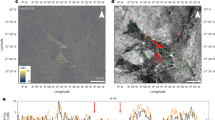
2017年9月28日获得了象山火灾现场的高分辨率Worldview-3火灾后图像,用于视觉验证基于sar的烧伤区域地图。2018年7月,也就是野火发生一年后,在象山火灾地区进行了实地调查。代表不同烧伤严重程度的地面真实数据是通过实地检查和无人机收集的。图2显示了不同地形条件下的烧伤严重程度。

2018年7月18日至19日,在象牙山火灾现场拍摄的照片显示了不同地形条件下的烧伤严重程度。
为了验证和验证基于sar的制图结果,在2017年的象山大火、2018年的坎普大火和2019年的查克格溪大火中,选择了无云哨兵-2多光谱仪器(MSI)在野火之前、期间和之后的图像。为了验证,使用火灾前和火灾后的归一化燃烧比(NBR)和它们的差异(表示为dNBR)使用方程自动提取烧伤区域。(1)、(2)对于每个研究区域,基于火灾后Sentinel-2图像的烧伤区域图随机选择20,000个验证点(烧伤和未烧伤区域各1万个验证点),对基于sar的最终烧伤区域图的准确性进行定量评估。需要注意的是,随机选择的训练和验证数据集来自同一地理区域。因此,有一些验证样本重叠或靠近训练样本的可能性很小。这可能会影响映射结果的整体准确性。由于野火期间缺乏地面真实数据,并且在野火期间没有Sentinel-2或Landsat图像与每次SAR采集相耦合,因此基于SAR的递进图与每次SAR数据采集日期后获取的Sentinel-2图像衍生的烧伤区域图进行了视觉比较。
为了更好地了解不同条件下SAR时间后向散射的行为,收集了研究区的降水数据。对于象山火灾,使用的降水数据为persann - cdr,这是基于人工神经网络气候数据记录的遥感信息的日降水估计,分辨率为0.25弧度49,50。对于营火,降水数据来自气候灾害组红外降水与站数据(CHIRPS),这是一个30年的准全球日降雨量数据集,它结合了0.05°分辨率的卫星图像和原位站数据51。
结果与讨论
燃烧与未燃烧植被的Sentinel-1 SAR后向散射图
为了更好地了解燃烧和未燃烧植被的SAR后向散射行为,在SAR时间序列上选择了几个代表相似植被(火灾前)和地形条件(高程、坡度、坡向)下森林和草地的兴趣区(AOI),分析和比较了它们的时间后向散射模式。表1给出了燃烧和未燃烧森林和草地的几对可比较aoi对应的SAR后向散射统计数据。对于每个AOI,列出了SAR后向散射的位置、大小和地形信息,以及它们的时间均值和标准差。我们对这两个火灾事件使用不同大小的aoi的原因是,营火的地形要比象山火灾复杂得多,而且是局部动态的。因此,较小的aoi更具有同质性和代表性。
燃烧和未燃烧的森林和草地的SAR时间后向散射行为示例,对应于表1所列aoi,如图3所示。由于植被湿度和土壤湿度条件会影响SAR后向散射,因此对于每对aoi,日降水直方图也显示在该图中。图3(a、b)分别显示了象山火灾现场森林和草地SAR后向散射随时间的变化,(c)和(d)显示了营火现场SAR后向散射随时间的变化。从图3(a)可以看出,在2017年7月6日山火事件发生前,被烧毁森林和未被烧毁森林的aoi具有相同的SAR后向散射图,说明森林区域在火灾发生前具有非常相似的植被和地形条件。7月6日之后,燃烧AOI中C-VH和C-VV极化的平均后向散射下降了约2-3.5 db,标准差较大,而未燃烧AOI的SAR平均后向散射保持较稳定。尽管C-VV的后向散射系数比C-VH高几个db,但c - hv和C-VV的后向散射的时间趋势非常相似。降水事件对森林的后向散射没有影响,因为降水事件发生在SAR数据采集之前。同样,在营火现场的森林AOI中,燃烧后的AOI与未燃烧前的AOI具有相似的反向散射模式。但火灾发生后,c - vv和c - vh后向散射系数均有所增加,如图3(c)所示。毁林后向散射的增加可能是由于在SAR数据获取之前的降雨事件导致毁林地区土壤含水量升高所致。

在地形相似、植被类型相同的四对未燃烧aoi和燃烧aoi中,SAR后向散射随时间变化。SAR的后向散射行为在两方面具有可比性。(a)象山的森林aoi (ASC-64)。(b)象鼻山的草地aoi (ASC-64)。(c)营火中的森林aoi (ASC-137)。(d)营火中的草地aoi (ASC-137)。
对于象山火灾现场的草地aoi,观测到与森林相似的时间后向散射模式,如图3(b)所示。燃烧AOI的平均后向散射减小,而未燃烧AOI的平均后向散射保持相对稳定。降水事件也不影响SAR后向散射,因为降水事件不是在SAR数据获取之前发生的。对于营火站点的草地AOIs,如图3(d)所示,由于降雨事件,野火开始后C-VV后向散射明显增加,与营火站点的森林后向散射增加相似。2018年11月21日~ 11月28日发生多次强降雨事件,燃烧区VV对土壤湿度的敏感性高于VH。而火灾后未烧毁和烧毁草地的C-VH后向散射模式基本不变。其原因还需要进一步研究,因为根据文献,c波段雷达特征通常不受火灾事件下干草的显著影响。这一观察结果进一步证实了以前的发现,即确定非森林植被(即草地)的烧毁面积并不那么简单。
Sentinel-1 SAR用于近实时野火进展监测
象山火
图4给出了基于sar的象山火野火进展图,通过不同的方法进行估计,包括经典对数比(logRt)35, logRt与相应的历史stdDev图(kmap)之间的比值以及基于cnn的框架。前三行是估计的变化图,第四行是与第三行CNN预测的burn置信度图对应的二进制级数图。第5行,标记为CNN_mrg,表示每个日期的合并进度图,通过累积日期之前的所有进度图生成。为减少不必要的噪声,前两个日期即2017年7月8日和7月20日不进行合并操作。最后一行,CNN_tsc_mrg表示在合并前对同一轨道上的级数图进行了简单的时间序列校正(TSC)。假设之前出现过的烧毁区域不会在后面的级数中消失,TSC可以在后面的级数图的基础上减少前面的级数图中的噪声像素。然而,对于TSC, CNN_tsc_mrg不再是接近实时的方法,因为它取决于未来的进程图。对于象山火灾中的任何日期,TSC都是通过将其与同一轨道上的未来进展地图相乘来实现的。

三种不同方法对大象火灾的基于sar的结果。logRt为与[ΔβVH, ΔβVV, ΔβVH]的假色合成,第二行为kmap与[kVH, kVV, kVH]的假色合成。第三行为CNN预测的刻录置信度图(记为CNN burnConf),第四行为相应的二进制刻录图,标记为CNN burnMap。CNN_mrg是考虑日期之前累积的烧成图,而CNN_tsc_mrg是经过时间序列校正后,与CNN_mrg相同的归并操作生成的。
为了定量评估基于sar的燃烧区域结果,Sentinel-2 dNBR被分割成燃烧区域和未燃烧区域的二值图,并与现场数据和WorldView-3图像一起作为参考图。分别从燃烧区域和未燃烧区域随机选择10,000个验证点。表2给出了基于sar的大象山火野火进展结果的定量评价。在logRt、kmap、CNN_mrg和CNN_tsc_mrg中,CNN_mrg在Precision、Recall、OA、Kappa和F1上的值最高,CNN_tsc_mrg排名第二,两者都远高于基于logRt和kmap的结果。值得注意的是,CNN_tsc_mrg在Recall中达到了非常高的值(0.9952),这意味着与CNN_mrg的Recall(0.9336)相比,TSC大大降低了误报率。
由于缺乏野火期间获得的与SAR图像相同日期的野外数据和光学图像,通过将CNN_mrg叠加在Sentinel-2假彩色合成图(R = SWIR2, G = SWIR1, B = SWIR2)上,视觉上验证了进度图。对于CNN_mrg_overlay中的每张地图,使用SAR获取后最接近无云日期的Sentinel-2图像。目视观测结果表明,Sentinel-1 SAR级进图与Sentinel- 2全时间序列的烧伤面积高度吻合。叠加的示例如图5所示。

基于Sentinel-1的象山山野火进展图(CNN_mrg为透明红色)覆盖在Sentinel-2 MSI假色合成图(R = SWIR2, G = SWIR1, B = SWIR2)上。(a) msi - 7月10日的sar - 7月8日。(b) msi - 7月30日的sar - 7月20日。(c) SAR-Aug。8月1日4. (d) SAR-Aug。8月8日11. SAR-Aug (e)。8月21日22. SAR-Sept (f)。10月18日3. 这些图像是使用Google Earth Engine平台生成的(地图数据:Google, ESA)。
营火
基于sar的Camp Fire野火进展图如图6所示,通过不同的方法估计,包括绝对操作的logRt(表示为logRt_abs)、kmap和CNN燃烧置信度图(CNN burnConf)。与logRt_abs和kmap相比,我们可以发现CNN burnConf很好地突出了烧伤区域,这对后续的分割至关重要。标记为CNN burnMap的那一行为带有Otsu thresholding52的CNN burnConf map对应的二值图,对于象山火,用类似的程序生成CNN_mrg和CNN_tsc_mrg。对于营火,logRt_abs被用来检测正的和负的后向散射变化,因为在火灾相关区域同时存在增加和减少的后向散射变化。在logRt_abs映射中,如图6第一行所示,是假色合成(R = |ΔβVH|, G = |ΔβVV|, B = |ΔβVH|)。

营地大火的sar结果。logRt_abs为[|ΔβVH|, |ΔβVV|, |ΔβVH|]的假色合成,第二行为kmap与[kVH, kVV, kVH]的假色合成。第三行是CNN预测的刻录置信度图,第四行是相应的二进制刻录图,标记为CNN burnMap。CNN_mrg是保留考虑日期前所有检测到的CNN烧损图而得到的累积烧损图,而CNN_tsc_mrg是经过与CNN_mrg相同的归并操作,在同一轨道上进行时间序列校正生成的。最下面一行显示的是将CNN_mrg地图叠加在基于s2的假彩色地图上的复合图[R = SWIR2, G = SWIR1, B = SWIR2]的叠加图。
在前4个阶段,大部分燃烧区域呈紫色,表明VH背向散射对野火事件引起的变化比VV更敏感,而白色像元表明VH和VV对野火事件引起的变化具有相似的敏感性。然而,在最后四个阶段,烧伤区域看起来非常不同,呈现绿色而不是紫色。绿色像素表示VV后向散射比VH对火灾引起的变化更敏感。这是因为2018年11月21日至11月28日期间出现了多次强降水,而在烧伤地区,VV对土壤湿度的敏感性高于VH。如CNN burnConf图所示,前两个阶段(a)和(b)表明,CNN有助于增强燃烧区域和未燃烧区域之间的差异,但观察到明显的高估和低估。随着新的SAR数据的出现,CNN模型被进一步微调,然后预测的CNN burnConf地图显示出比前两个阶段更好的烧焦和未烧焦像素之间的对比度。通过高斯滤波和Otsu阈值52,将[0,1]范围内的CNN burnConf map二值化为CNN burnMap。正如预期的那样,第一阶段(a)看起来相当嘈杂,而后期阶段以较少的噪音检测到大部分燃烧区域。CNN_mrg结合了当前日期之前在不同轨道上检测到的所有燃烧区域,除了第一个日期,2017年11月11日,太吵了。CNN_tsc_mrg通过对同一轨道进行时间序列校正,提供了虚警像素较少的非近实时结果。通过叠加基于sentinel -1 sar的进展结果(透明红色)和Sentinel-2 SWIR合成结果,底部一行表明,基于sentinel -1 sar的进展地图和Senintel-2火痕之间存在一定程度的一致性。与象山大火的目视观测相比,营火的一致性并不好。
基于sar的营火野火进展结果的定量评估见表3。在kmap中,C-VV在OA、Kappa和F1得分上的值远高于C-VH, C-VV和C-VH结合使用比单独使用VV或VH准确率更高。结合VH和VV, CNN_mrg总体准确率达到83.58% (Kappa: 0.6716, F1: 0.8139),且CNN_tsc_mrg比CNN_mrg具有更高的Recall值,即更低的虚警率。
查克格溪火
图7给出了基于sar的Chunkegg Creek Fire的野火进展图,该图由logRt、kmap和基于cnn的深度学习框架估计。与“象山大火”和“坎普大火”不同的是,“哨兵-1”卫星每6天在同一轨道(ASC20)上对恰克格溪大火进行一次成像,成像频率更高。基于logrt的级数图显示,VV和VH后向散射对火灾变化具有相似的敏感性,因此燃烧区域呈现白色。然而,它们对农业活动引起的变化的反应却大不相同。虽然VH略有增加,但VV在农业区显著下降(绿色部分)。与野火事件类似,农业活动可能导致VV后向散射显著减少,从而导致误报。由于农业领域在历史时间序列中往往具有较高的标准差,因此kmap比log ratio更能抑制农业活动相关的变化,如第二行所示。利用二值化后的kmap样本进行训练,基于cnn的框架可以突出烧伤区域,并抑制农业活动引起的误报,如CNN_burnConf和CNN_burnMap所示。CNN_mrg和CNN_tsc_mrg分别为未加TSC和加TSC后燃烧区域的合并结果。下图为光学图像与基于SAR的结果的视觉对比,这表明SAR数据有可能检测到大部分烧伤区域,但一些低烧伤严重程度且没有结构变化的区域可能会被遗漏。

基于sar的Chuckegg Creek火灾结果(2019年)。logRt为与[ΔβVH, ΔβVV, ΔβVH]的假色合成,第二行为kmap与[kVH, kVV, kVH]的假色合成。第三行是CNN预测的刻录置信度图,第四行是相应的二进制刻录图,标记为CNN burnMap。CNN_mrg是保留考虑日期前所有检测到的CNN烧损图而得到的累积烧损图,而CNN_tsc_mrg是经过与CNN_mrg相同的归并操作,在同一轨道上进行时间序列校正生成的。最下面一行显示的是将CNN_mrg地图叠加在基于s2的假彩色地图[R = SWIR2, G = SWIR1, B = SWIR2]上的叠加地图。
表4总结了基于sar的野火进展制图结果的定量分析,这些统计数据分别是基于从燃烧区和未燃烧区随机抽取的10,000个样本。使用kmap, VH和VV都达到了很高的Recall值,但Precision值很低,说明两者的假阴性率很低,假阳性率很高。结合VH和VV, kmap在不显著降低召回率的情况下获得了更高的精度,从而提高了OA(73.05%)、Kappa(0.4609)和F1(0.6339)。采用本文提出的基于cnn的框架,同时使用VH和VV数据,CNN_mrg可以在Precision上取得显著提高,Recall上略有下降(0.3%),OA为88.09%,Kappa为0.7618,F1得分为0.8666。通过利用TSC, CNN_tsc_mrg可以很好地去除噪声像素,但精度略有下降。
结论
在本文中,我们使用基于CNN的新型全自动深度学习框架,评估了sentinel -1 SAR时间序列对近实时野火进展的监测。SAR后向散射曲线分析表明,在象山火和营火地点(营火地点的C-VH除外),被烧毁的森林和草地之间存在显著差异。基于cnn的深度学习框架在检测烧伤区域方面表现得比基于对数比的kmap要好得多,在这三个研究区域的Kappa显著提高:(象山火灾为0.11,坎普火灾为0.27,查克格河火灾为0.30)。通过对当地数据进行微调,我们证明了所提出的CNN框架在监测不同地理区域和不同地形条件下的三场大型野火的进展方面是有效的。计划进行更多的研究,以进一步证明CNN框架通过逐像素网络前向传播对其他野火事件的可转移性。基于时间序列的异常检测方法利用在野火事件发生前获取的所有可用SAR数据,根据不同环境条件下的后向散射变化来表征该区域,可以有效地生成粗略的烧伤区域图,这对CNN框架的自动训练至关重要。这项研究是在具有挑战性的地形条件下首次尝试使用SAR时间序列和深度学习来监测野火进展。研究结果表明,使用全自动深度学习框架,当RADARSAT星座任务和SAR CubeSat星座发射的数据以每日和每小时为间隔可用时,星载SAR数据可以在实时野火进程监测中发挥重要作用。
方法
该方法的主要目标是开发一种基于深度学习框架的新型全自动程序,该框架利用在野火事件期间获取的每个新的Sentinel-1 SAR图像来近乎实时地监控火灾进展。当野火发生时,从档案中收集研究区域的火灾前SAR密集时间序列,并获得野火事件期间近实时的新SAR图像。特别是,该方法有两个创新之处,一是利用在野火事件发生前获取的所有可用SAR数据,根据不同环境条件(如季节效应、不同土地覆盖、天气条件等)引起的SAR后向散射变化来表征该地区;二是自动训练隐式深度学习框架,以估计野火期间获取的SAR图像的变化。该方法包括四个主要的处理步骤。首先,对火灾前和火灾后的SAR图像进行对数比对,检测野火引起的变化。然后,利用基于时间序列的异常检测技术,生成燃烧区域和未燃烧区域的粗二值图。利用粗二值变化图自动生成的训练样本,对CNN进行训练和拟合,以细化烧伤区域检测并生成烧伤置信度图。最后一步是使用Otsu自动阈值方法对置信图进行二值化,并逐步合并单个野火进程图,以提高其可靠性和一致性。该方法的概述如图8所示。在下面的小节中,报告了对不同步骤的完整描述。

基于cnn的近实时野火监测在线学习框架。
基于对数比的变化测量
来检测野火引起的变化。对比了火灾前后的SAR图像。对于野火开始后获得的每张新SAR图像,选取一张火灾前图像作为每个可用上升(ASC)或下降(DSC)轨道的主图像。通过对主图像(火灾前)和从图像(火灾开始后)应用对数比算子,分别得到C-VV和C-VH的变化图,并建立相应的对数比时间序列。在选择最优主图像时,要考虑最大限度地减少季节影响和避免在暴雨事件后获取主图像。基于对数比的变化测量定义如下公式:
式中,r∈{ASC-μ, DSC-ν}表示对应的轨道方向(ASC或DSC)和相对起始轨道数(μ或ν), βr表示雷达后向散射值,m和s分别表示开火前(主)和开火后(从)图像。通过对主映像和从映像应用log-ratio,可以得到变化映射Δβr,该映射估计主映像和从映像之间的差异程度。随后使用StdDev图对变化图Δβr进行二值化,作为SAR后向散射规则振荡的参考估计。为了方便和简洁,Δβr和σr被改写为Δβ和σ。
基于时间序列的异常检测
基于火灾前SAR时间序列,计算每个像元对应的均值和标准差(StdDev),形成均值图和StdDev图。在同一研究区域,分别基于ASC和DSC轨道的历史SAR时间序列,计算了包括VH和VV极化的StdDev图σ。StdDev地图估算了SAR后向散射随季节变化的正常方差,这将为研究区域的不同土地覆盖类型提供逐像元参考水平。
式中\(\bar{\beta}\)表示同一轨道上可用SAR时间序列的平均图像,长度记为N,即同一轨道上获取的可用图像总数。
为了检测野火事件引起的异常方差,可以将|Δβ(i, j)|除σ,得到k-Map,如式5所示。k-map Ik估计研究区域内每个像素的|Δβ(i, j)|大于相应σ的次数:k-map值越高,表示异常变化对应的变化概率越高。
如式(6)所示,可以将Ik映射变换为阈值为k0的二值映射I,即在估计的对数比映射中,如果像素值大于k0,则视为异常像素(即烧毁像素),否则视为正常像素,即未烧毁像素。在实践中,k0 = 2是检测异常变化和抑制噪声之间的一个很好的折衷。生成的二值图是下一个CNN细化步骤的主要输入,作为自动选择训练样本的参考数据。
基于深度学习的烧伤面积细化
如图8所示,我们使用二值logt地图时间序列,选择烧焦和未烧焦的样本,训练CNN模型,自动检测烧焦区域。通过对可用日期的迭代,将每张图像与相应的主图像和同一轨道的StdDev地图进行叠加,并在其上叠加高程、坡度、坡向等DEM产品。通过StdDev二值化,从log-ratio算法识别的烧焦区域和未烧焦区域中随机选择相同数量的训练样本,将这些训练样本存储到数据库中,用于训练CNN模型,进一步细化烧焦区域。在测试阶段,当将图像堆栈输入到该CNN模型中时,将自动生成相应的烧伤面积映射。
CNN框架的设计目的是产生一个以燃烧和未燃烧像素的双峰分布为特征的置信度图。设F(θ)为检测烧伤区域的可学习深度网络,我们可以在网络F(θ) (FL(θ)的简称,其中l为网络层总数)中通过前向传递patch Pi得到前l层的输出\({{\bf{O}}}_{i}^{l}\),前向传递记为Eq.(7)中的⊗。
其中Fl(θ)表示F(θ)的前l层,θ收集Fl(θ)的权值和偏置,l = 0,1,2,…,l。特别地,将输入层作为第0层,\({{\bf{O}}}_{i}^{0}={{\bf{P}}}}_{i}\)。所以\之间的关系({{\ bf {O}}} _{我}^ {l} \)和\ ({{\ bf {O}}} _{我}^ {l - 1} \)可以被制定为:
式中,Wl和bl分别表示F(θ)中第l层的权重和偏置,δ为ReLU激活函数38。表5列出了使用的CNN架构,它有18层神经网络,每个卷积层后面都有一个ReLU激活(最后一层是sigmoid)。CNN burnConf map是通过对最后一层的输出应用sigmoid激活得到的,因为烧伤面积检测实际上是一个二值分类问题,而sigmoid激活是一个很好的选择,可以将预测置信度缩放到[0,1]范围内。
使用随机采样数据(Pi, yi),可以学习基于cnn的非线性变化指标F(θ),用于根据SAR数据突出烧伤区域。预测燃烧信心向量\({\帽子{{\ bf {y}}}} _{我}在{R} \ ^{2 \ * 1} \)可以通过挤压\ ({{\ bf {O}}} _{我}^ {L} = {{\ bf {P}}} _{我}\ otimes {\ bf {F}}在{R} ^(θ)\ \{2 \ * 1 \ * 1 \ * 1}\)。因此,损失函数可表示为:
其中n是训练样本的数量,θ是所有层的可学习网络参数,包括权重和偏置,λ控制权重衰减率。在我们的实验中,我们设置λ = 0.001。训练完成后,可以得到相应的burn置信度图,用于更新二进制logt时间序列,以便下一次训练。像这样,Pseudo标签更新有助于提供更可靠的标签,但这不是必需的。此外,可以集成数字高程模型(DEM)产品,将地形作为附加输入层考虑在内。
CNN BurnConf maps:二值化和时间序列合并
CNN细化的输出是CNN burnConf maps,其中像素值的范围从0到1,它们与每个像素代表一个烧毁区域的概率成正比(0:未烧毁,1:烧毁)。使用所提出的CNN框架的主要优点是,与基于对数比的结果(通过除最大值缩放到[0,1])的单峰分布相比,烧焦像素和未烧焦像素之间的后向散射变化差异表现为清晰的双峰分布(见图9)。因此,CNN burnConf映射很容易使用Otsu自动阈值分割技术进行二值化52。

最后阶段CNN burnConf和logRT映射的分布对比。
为了生成更可靠和一致的火灾级数图,采用两种不同的方法将不同阶段的二进制野火级数图组合在一起。第一种方法是近实时野火进展监测,它简单地将新的野火进展图与以前的野火进展图结合起来,生成最新的燃烧区域图。该方法不使用后烧图来改进前烧图的结果。研究人员对这种方法进行了研究,以突出基于sar的CNN框架在近实时野火监测方面的潜力。第二种方法是后处理步骤,它使用所有生成的二进制图来利用可用的多时间信息更新五个进度图。该方法通过对生成的燃烧地图时间序列进行高斯时间滤波来减少噪声,并可用于获得更可靠的火灾进程描述,以进行火灾后分析(即校准火灾进程模型)。
数据可用性
在当前研究期间生成和/或分析的数据集可根据通讯作者的合理要求提供。
参考文献
岳晓东,米克利,林杰,罗根,j.a.和卡普兰,j.o.。21世纪中期美国西部野火活动和碳质气溶胶浓度的整体预测。大气压。环境,77,767-780,https://doi.org/10.1016/j.atmosenv.2013.06.003(2013)。
施罗德等。使用ASTER和ETM+数据验证GOES和MODIS主动火灾探测产品。遥远。参议员包围。, https://doi.org/10.1016/j.rse.2008.01.005(2008)。
Schroeder, W., Oliva, P., Giglio, L. & Csiszar, i.a.新的VIIRS 375 m主动火灾探测数据产品:算法描述和初步评估。遥远。传感器环境,143,85-96,https://doi.org/10.1016/j.rse.2013.12.008(2014)。
伍尔德,m.a.等。利用多时相Landsat和LIDAR数据表征北方森林野火。遥远。环境科学,113,1540-1555,https://doi.org/10.1016/j.rse.2009.03.004(2009)。
Quintano, C, Fernández-Manso, A.和Fernández-Manso, O.结合Landsat和Sentinel-2 MSI数据初步评估烧伤严重程度。Int。j:。地球观察。地理学报,64,221-225,https://doi.org/10.1016/j.jag.2017.09.014(2018).使用本文
Crowley, M. A, Cardille, J. A, White, J. C. and Wulder, M. A.多传感器,多尺度,贝叶斯数据合成用于绘制年内野火进展。遥远。参议院通讯,10,302-311,https://doi.org/10.1080/2150704X.2018.1536300(2019)。
Chuvieco, E.等。利用卫星对地观测绘制火灾区域的历史背景和当前发展。遥远。传感器环境,225,45-64,https://doi.org/10.1016/j.rse.2019.02.013(2019)。
Engelbrecht, J, Theron, A, Vhengani, L. & Kemp, J.一种基于多极化c波段SAR的简单归一化差分方法的烧伤区域映射[J]。Sens. 9,764, https://doi.org/10.3390/rs9080764(2017)。
French, n.h., Bourgeau-Chavez, l.l., Wang, Y. & Kasischke, E. S.阿拉斯加内陆火灾干扰地点雷达卫星图像的初步观测。遥远。环境科学,68,89-94,https://doi.org/10.1016/S0034-4257(98)00094-7(1999)。
够了,d.g.等人。使用Radarsat-2极化SAR数据绘制火灾疤痕。可以。j .遥远。参议员37,500-509,https://doi.org/10.5589/m11-060(2012)。
P.等。植被火灾对后向散射的影响:基于Sentinel-1观测的研究。[j]。上面。达成。地球观察。遥远。sen10, 4478-4492, https://doi.org/10.1109/JSTARS.2017.2717039(2017)。
穆洛特等人。星载遥感全球毁损区产品十年回顾:用户需求分析和未来发展建议。Int。j:。地球观察。地理学报,26,64-79,https://doi.org/10.1016/j.jag.2013.05.014(2014)。
Polychronaki, A, Gitas, I., Veraverbeke, S.和Debien, A.基于目标分类的ALOS PALSAR图像在希腊烧伤区域测绘中的评价。遥远。sen5, 5680-5701, https://doi.org/10.3390/rs5115680(2013)。
Stroppiana等人。光学和SAR数据集成用于地中海地区烧伤区制图。遥远。sen7, 1320-1345, https://doi.org/10.3390/rs70201320(2015)。
唐泽,M. A., psamrez - cabello, F., De La Riva, J., Santoro, M.基于TerraSAR-X数据的地中海倾斜地形森林烧伤严重程度评价。IEEE反式。Geosci。遥远。sen48, 917-929, https://doi.org/10.1109/TGRS.2009.2025943(2010)。
Tanase, m.a.等。X、C和l波段SAR后向散射对地中海松林烧伤严重程度的敏感性IEEE反式。Geosci。遥远。sen48, 3663-3675, https://doi.org/10.1109/TGRS.2010.2049653(2010)。
Bourgeau-Chavez, L., Kasischke, E., Brunzell, S., Mudd, J.和Tukman, M.利用成像雷达数据绘制全球北方森林的火灾伤痕。Int。j .遥远。sen23, 4211-4234, https://doi.org/10.1080/01431160110109589(2002)。
Gimeno, M, San-Miguel-Ayanz, J. & Schmuck, G.利用ERS-2 SAR时间序列识别地中海森林环境中的燃烧区域。Int。j .遥远。sen25, 4873-4888, https://doi.org/10.1080/01431160412331269715(2004)。
verheghen, A.等。哨兵卫星在刚果盆地森林烧伤区测绘和监测方面的潜力。遥远。sen8, 986, https://doi.org/10.3390/rs8120986(2016)。
2008年加里波利森林火灾的c波段SAR后向散射评价。IEEE Geosci。遥远。参议院通讯,12,1091-1095,https://doi.org/10.1109/LGRS.2014.2382716(2015)。
Siegert, F. & Ruecker, G.利用多时相ERS-2 SAR图像识别东南亚热带雨林烧伤疤痕。Int。j .遥远。sen21, 831-837, https://doi.org/10.1080/014311600210632(2000)。
蒙格斯,C,巴托洛,R,贝尔,D.和希尔,G. E.热带草原火灾对澳大利亚北部sar反向散射的影响。Int。j .遥远。sen25, 4857-4871, https://doi.org/10.1080/01431160410001712945(2004)。
黄,S.和Siegert, F. ENVISAT ASAR宽幅图像中西伯利亚北方森林火灾疤痕的后向散射变化。IEEE Geosci。遥远。参议员通讯,3,154 - 158,https://doi.org/10.1109/LGRS.2005.860483(2006)。
Belenguer-Plomer, M. A, Tanase, M. A, Fernandez-Carrillo, A.和Chuvieco, E.基于sentinel-1背向散射系数和热异常的烧伤区域探测与制图。遥远。环境科学,233,111345,https://doi.org/10.1016/j.rse.2019.111345(2019).链接本文:
Reiche, J, de Bruin, S, Hoekman, D, Verbesselt, J. & Herold, M. A结合Landsat和ALOS PALSAR时间序列进行近实时森林砍伐检测的贝叶斯方法。遥远。传感器7,4973-4996,https://doi.org/10.3390/rs70504973(2015)。
Reiche, J, Verbesselt, J, Hoekman, D.和Herold, M.融合Landsat和SAR时间序列来探测热带地区的森林砍伐。遥远。环境科学,156,276-293,https://doi.org/10.1016/j.rse.2014.10.001(2015)。
Reiche, J, Hamunyela, E, Verbesselt, J, Hoekman, D. & Herold, M.基于Landsat和ALOS-2 PALSAR-2的密集Sentinel-1时间序列改进热带干旱森林近实时森林砍伐监测。遥远。环境科学,204,147 - 161,https://doi.org/10.1016/j.rse.2017.10.034(2018).链接本文:
潘旸。多时相遥感,https://doi.org/10.1007/978-3-319-47037-5(2016)。
DeVries, B., Verbesselt, J., Kooistra, L.和Herold, M.基于Landsat时间序列的热带山地森林小尺度森林扰动的鲁棒监测。遥远。传感器环境,161,107-121,https://doi.org/10.1016/j.rse.2015.02.012(2015).链接本文:
汉森,m.c.等。高分辨率全球地图。科学学报,2011-2014,https://doi.org/10.1126/science.1244693(2013)。
拉斯皮尼,F.等。使用Sentinel-1卫星对地面变形进行连续半自动监测。科学。众议员8,7253,https://doi.org/10.1038/s41598-018-25369-w(2018)。
朱振和Woodcock, C. E.基于所有可用Landsat数据的土地覆盖连续变化检测与分类。遥远。传感器环境,144,152-171,https://doi.org/10.1016/j.rse.2014.01.011(2014).链接本文:
基于MAP-MRF分类器和非局部均值相似权的sar城市变化检测改进。[j]。上面。达成。地球观察。遥远。sen7, 4288-4300, https://doi.org/10.1109/JSTARS.2014.2347171(2014)。
Bruzzone, L. & Prieto, D. F.无监督变化检测的差异图像自动分析。IEEE反式。Geosci。遥远。sen38, 1171-1182, https://doi.org/10.1109/36.843009(2000)。
Bazi, Y., Bruzzone, L.和Melgani, F.基于广义高斯模型的多时段SAR图像自动变化检测方法。IEEE反式。Geosci。遥远。参议员43,874-887,https://doi.org/10.1109/TGRS.2004.842441。(2005)。
一种保留细节的尺度驱动方法用于多时相SAR图像的变化检测。IEEE反式。Geosci。遥远。sen43, 2963-2972, https://doi.org/10.1109/TGRS.2005.857987(2005)。
多光谱图像中多变化检测的自适应阈值方法。《电子电气与电子工程师学会会刊》。Geosci。和遥感系统。, 233-236, https://doi.org/10.1109/IGARSS.2011.6048935 (IEEE, 2011)。
Krizhevsky, A., Sutskever, I.和Hinton, G. E.基于深度卷积神经网络的图像网络分类。In Adv. In Neural Inf Process。系统1097-1105,https://doi.org/10.1145/3065386(2012)。
何凯,张翔,任胜,孙杰。基于深度残差学习的图像识别。摘自《IEEE计算机会议论文集》。视觉与模式识别。, 770-778, https://arxiv.org/abs/1512.03385v1(2016)。
Redmon, J, Divvala, S, Girshick, R.和Farhadi, A.你只看一次:统一的实时目标检测。摘自《IEEE计算机会议论文集》。视觉与模式识别。, 779-788, https://doi.org/10.1109/CVPR.2016.91(2016)。
Long, J, Shelhamer, E.和Darrell, T.语义分割的全卷积网络。摘自《IEEE计算机会议论文集》。视觉与模式识别。, 3431-3440, https://doi.org/10.1109/TPAMI.2016.2572683(2015)。
龚明,赵军,刘军,苗强,焦林。基于深度神经网络的合成孔径雷达图像变化检测。IEEE反式。神经。学习。系统27,125-138,https://doi.org/10.1109/TNNLS.2015.2435783(2015)。
龚明,杨辉,张鹏。基于深度学习的SAR图像三元变化检测特征学习和变化特征分类。图片来源:ISPRS遥远。sen129, 212-225, https://doi.org/10.1016/j.isprsjprs.2017.05.001(2017)。
朱晓霞等。遥感中的深度学习:一个全面的回顾和资源列表。IEEE Geosci。遥远。sens ma5, 8-36, https://doi.org/10.1109/MGRS.2017.2762307(2017)。
张鹏,龚明,张辉,刘杰,班勇。基于无监督差分表示学习的多时相遥感图像多类型变化检测。IEEE反式。Geosci。遥远。sen57, 2277-2289, https://doi.org/10.1109/TGRS.2018.2872509(2018)。
哨兵1号任务,https://sentinel.esa.int/web/sentinel/missions/sentinel-1于2019年6月25日进入。
Gorelick, N.等。谷歌地球引擎:为每个人提供行星尺度的地理空间分析。遥远。传感器环境,202,18-27,https://doi.org/10.1016/j.rse.2017.06.031(2017).链接本文:
米勒,j.d.等。美国加州内华达山脉和克拉马斯山脉的相对差异归一化燃烧比(rdnbr)与三种火灾严重程度测量的校准和验证。遥远。环境科学,113,645-656,https://doi.org/10.1016/j.rse.2008.11.009(2009)。
Sorooshian等人。基于人工神经网络的遥感降水估算NOAA气候数据记录(CDR), Version 1, Revision 1。NOAA国家的。环境中心。参考,https://doi.org/10.7289/V51V5BWQ(2014)。
Ashouri, H.等。persann - cdr:水文和气候研究用多卫星观测的日降水气候数据记录。公牛。点。Meteorol。社会学报,96,69-83,https://doi.org/10.1175/BAMS-D-13-00068.1(2015)。
芬克,C.等。气候危害观测站红外降水——极端环境监测新记录。科学。数据2,150066,https://doi.org/10.1038/sdata.2015.66(2015)。
基于灰度直方图的阈值选择方法。IEEE反式。系统。人类,赛博计算机。9,62 - 66,https://doi.org/10.1109/TSMC.1979.4310076(1979)。
金马,D. P.和巴,J.亚当:一种随机优化方法。ar14预印本,https://arxiv.org/abs/1412.6980(2014)。
致谢
班一芳感谢皇家工学院的休假资金支持,使她和她的团队能够将她的研究扩展到基于sar的野火监测。她还要感谢加拿大林业局(太平洋林业中心)的Michael A. Wulder招待她休假。张普昭感谢中国留学基金委为他提供在KTH皇家理工学院学习的奖学金。由英国皇家理工学院提供的开放获取资金。
作者信息
作者及单位
贡献
Y.B.构思研究并设计实验,Y.B.和A.B.选择研究区域并进行实地调查,P.Z.和A.N.实施方法,A.B.提供高分辨率数据进行验证,Y.B.、P.Z.和A.N.分析结果并撰写手稿。A.B.和M.W.审阅和编辑了手稿。
相应的作者
道德声明
相互竞争的利益
作者声明没有利益冲突。
额外的信息
施普林格·自然对已出版地图的管辖权要求和机构关系保持中立。
权利和权限
开放获取本文遵循知识共享署名4.0国际许可协议,该协议允许以任何媒介或格式使用、共享、改编、分发和复制,只要您适当地注明原作者和来源,提供知识共享许可协议的链接,并注明是否进行了更改。本文中的图像或其他第三方材料包含在文章的知识共享许可协议中,除非在材料的署名中另有说明。如果材料未包含在文章的知识共享许可中,并且您的预期用途不被法律法规允许或超过允许的用途,您将需要直接从版权所有者处获得许可。要查看此许可证的副本,请访问http://creativecommons.org/licenses/by/4.0/。
关于本文

引用本文
Ban, Y., Zhang, P., Nascetti, A.等。基于Sentinel-1 SAR时间序列和深度学习的近实时野火进程监测。《科学通报》,2010,33(5)。https://doi.org/10.1038/s41598-019-56967-x
收稿日期:2019年7月7日
录用日期:2019年12月19日
发布日期:2020年1月28日
DOI: https://doi.org/10.1038/s41598 - 019 - 56967 - x
这篇文章是由
-
使用Sentinel-2图像和OBIA技术绘制泰国烧伤地区地图
科学报告(2024)
-
遥感技术在野火研究中的应用:文献计量学视角
消防技术(2024)
-
中国电网火灾研究综述:现状与新认识
消防技术(2024)
-
使用Sentinel-1和变化检测方法的全球洪水模型的比较
自然灾害(2024年)
-
野火对美国西部河流网络的影响越来越大
自然通讯(2021)
评论
通过提交评论,您同意遵守我们的条款和社区准则。如果你发现一些滥用或不符合我们的条款或指导方针,请标记为不适当。
